
[latexpage]

PID regulatoren inneholder typisk et «betjeningspanel» der vi kan stille inn ønsket «skal-verdi». (Merket: SV) Det finnes ofte også et indikatorfelt som viser er-verdien. (Merket: PV).
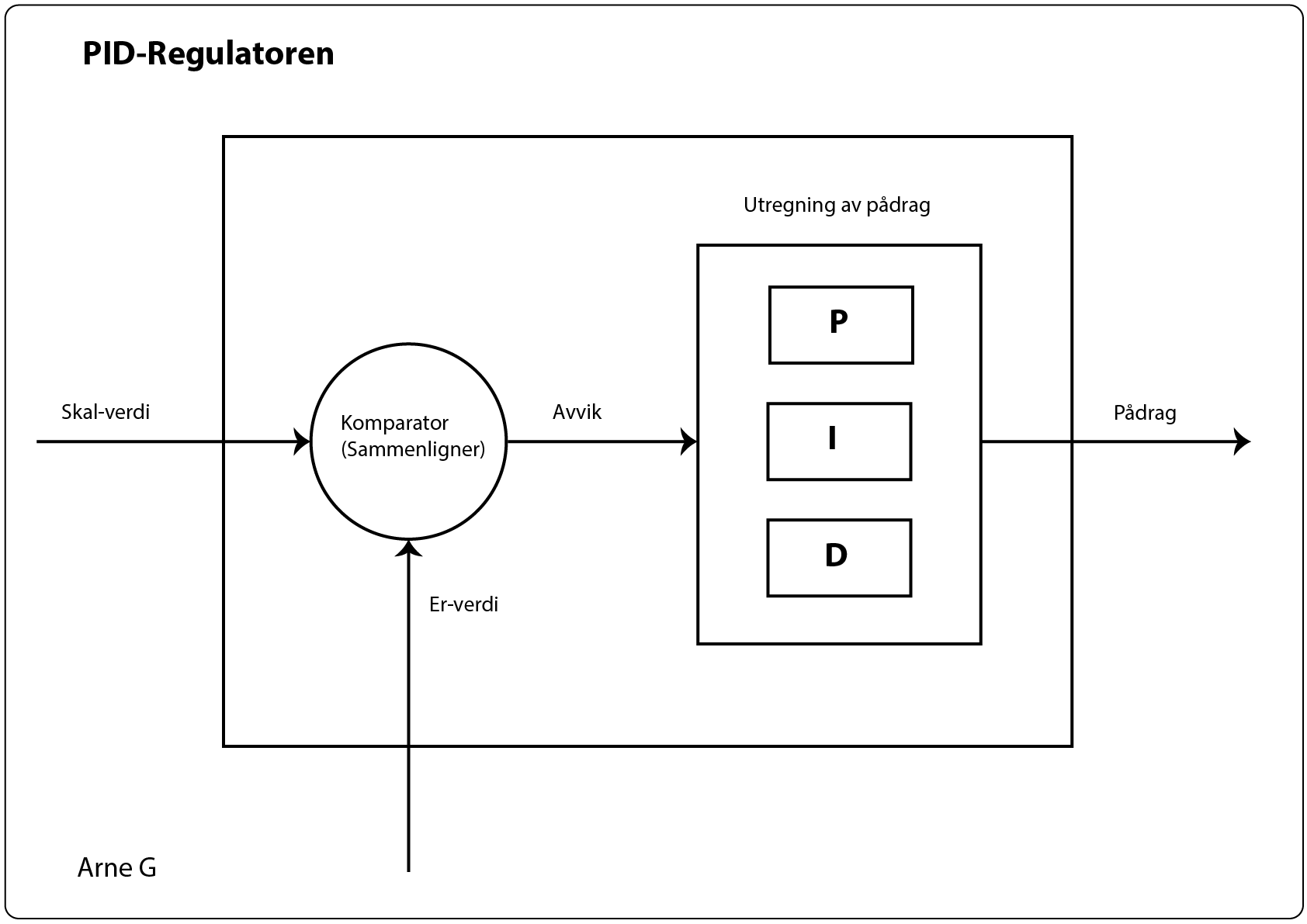
PID-regulatoren består hovedsaklig av to invendige «deler» eller «funksjoner».
En komparator eller en «sammenligner» som sammenligner verdien til skal-verdien og er-verdien. Ut i fra dette så regner komparatoren ut «avviket» eller «regularingsavviket». Dette «avviket» sendes så som inngangsparameter til en funksjon som regner ut riktig pådrag ut i fra tre funsjoner, P (proporsjonal). I (integral) og D (derivasjon).
Vi kaller denne typen reguering for «avviksregulering» ettersom det er reguleringsavviket eller forskjellen mellom skal og er verdi som brukes til å regne ut pådraget. Regulatoren kaller vi for en PID-regulator ettersom det er P, I og D funksjonen som brukes for å regne ut pådraget.
Opplysning om forsterkning – «P – Verdi» eller «Proporsjonalbånd».
P eller «forsterkningen» kan være oppgitt på to forskjellige måter, avhengig av fabrikat og modell. «P» kan være oppgitt «rett fram» som «forsterkning» eller som «proposjonalbånd» som på et vis er «det omvendte av forsterkningen.
- $ Pb=\frac { 100 }{ P } $ %
- $ P=\frac { 100 }{ Pb } $
Eksempel:
- Forsterkningen P = 5 dette gir et proposjonalbånd på 20%
- Proposjonalbåndet er på 25%. Dette gir en forsterkning på 4.
- Forsøk å sette inn i formlene!
Innvirkning av de ulike funksjonene i PID regulatoren.
Note: Hver «funksjon» virker ikke alene. P, I og D leddet virker til sammen i forhold til prosessen og prosessens egenskaper på en forholdsvis kompleks måte som bare kan beskrives på en noenlunde utdypende og nøyaktig måte ved hjelp av differensialligninger. Under så følger allikevell en «litt grov og forenklet beskrivelse» av de enkelte «leddene» eller «funksjonene» i PID-Regulatoren.
P-Funksjonen. Dette er PID-Regulatorens «grunnfunksjon» som gir et utgangspunkt for de andre funksjonene. P-kan brukes allene, men en ren «P-Regulator» har den svakhet at reguleringssløyfen normalt vil kjøre med et stasjonært avvik. Se også denne beskrivelsen.
I-Funksjonen. Den primære oppgaven til I-funksjonen er å ta vekk det stasjonære avviket. Se også denne beskrivelsen av Integralfunsjonen.
D-Funksjonen. D-leddet måler endringer i er-verdier. D-leddet kan brukes dersom vi har behov for å fange opp og korrigere pådraget for forholdsvis små endringer i prosessens er-verdi. Dette kan for eksempel være aktuelt i forbindelse med «trege prosesser» med «lang tidskontant». «D-Leddet» eller «D-Funksjonen» har den svakhet at den er svært utsatt for støy i målesignalet. Litt støy kan lett medføre en forholdsvis høy grad av ustabilitet. Av denne grunn så er det forholdvis vanlig at man disabler D-funksjonen (setter den til 0 s) og bruker PID regulatoren som en PI regulator. Se også denne beskrivelsen av D-Funksjonen.
På grunn av den komplekse sammenhengen mellom prosessens egenskaper, og P, I og D funksjonen i regulatoren, som reelt og virkelig bare kan beskrives med differensialligninger så er det slik at både feil instilling av P, I og D ledd kan medføre ustabilitet i reguleringssløyfen. For å finne riktige verdier for P, I og D-parametrene så må vi «optimalisere» reguleringssløyfen.