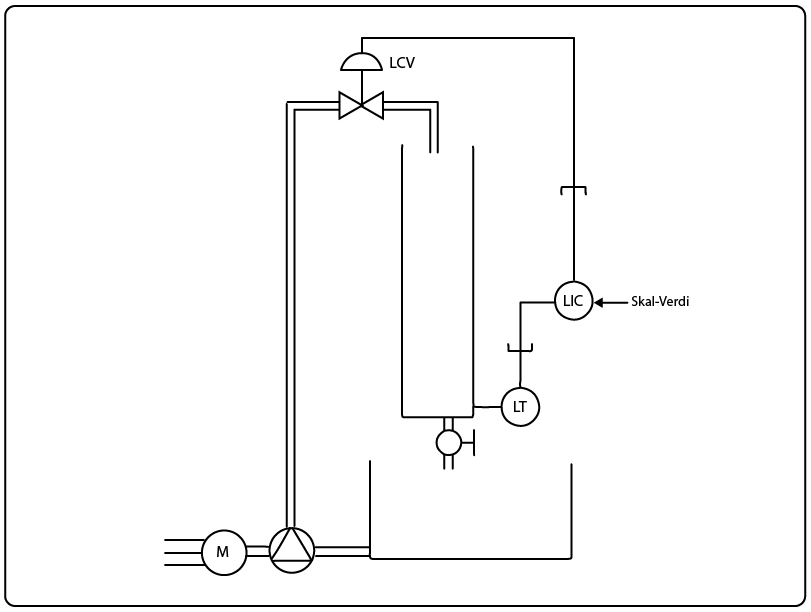
Her har vi en enkel reguleringssløyfe for nivåregulering som virker på denne måten:
Det finnes en motor og en pumpe som går med tilnærmet konstant turtall og som tilfører prosessen energi. Så finnes det også en reguleringssløyfe som består av følgende komponenter:
- LT – Level transmitter. Denne kan for eksempel gi ut et 4-20 mA analogt signal som representerer «er-verdien» for prosessen. Det kan for eksempel være 12mA som indikerer at nivået er på 50% i den øverste tanken.
- En regulator som sammenligner en ønsket «skal-verdi» med den faktiske «er-verdien» og som så ut i fra denne differansen mellom skal-verdi og er-verdi pluss også tre parametre «P», «I» og «D», regner ut «pådraget». «Pådragssignalet» kan også være et 4-20mA analogt elektrisk signal.
- En reguleringsventil som styrer innstrømningen av vann i den øverste tanken ved å gi en større eller mindre åpning på ventilen. Åpningen av ventilen styres fra regulatoren ved hjelp av det elektriske «pådragssignalet».
En litt mer detaljert forklaring av reguleringssløyfas virkemåte:
Det som reguleres er veskenivået i den øvre tanken. For å måle nivået så benyttes det en DP celle. Denne er merket «LT». LT står for Level Transmitter. Level transmitter sender et elektrisk signal til en regulator, LIC som forteller om hva er-verdien er, eller med andre ord om nivået i tenken. Signalet ut i fra LT vil kunne variere fra 0 til 24 mA, avhengig av nivået i tanken.
Regulatoren sammenlikner er-verdien med en ønsket skal-verdi. Ved å trekke i fra er-verdien fra skal verdien, så regner regulatoren ut reguleringsavviket. Dette reguleringsavviket bruker så regulatoren som grunnlag for å utføre noen matematiske beregninger i forhold til reguleringsavviket, som kan inbefatte en proporsjonalfaktor, en Integralfaktor og en derivasjonsfaktor. Vi snakker da om PID regulering.
P-funksjonen er på mange måter regulatorens «grunnfunksjon». Denne medfører at endringen i pådrag skjer proporsjonalt med reguleringsavviket. I+funksjonen virker over tid og tar vekk «stasjonært avvik», slik at reguleringen blir mer nøyaktig. D-funksjonen kan medføre at reguleringssløyfen regulerer hurtigere.
En problemstilling i forbindelse med reguleringssløyfer er imidlertid stabilitet, det vil si at reguleringssløyfa kan komme til å begynne å svinge i nivå. Nivået i det øverste karer ligger med andre ord ikke stabilt, men det svinger opp og ned.
Både for kraftig virkning av P-funksjonen, I-funksjonen og D-funksjonen kan medføre ustabilitet i sløyfa. Andre faktorer som har betydningen for stabilitet eller ustabilitet er prosessens tidskonstant og hvis det finnes «dødtider» i reguleringssløyfa.
Prosessens tidskonstant vil blant annet avhenge av diameteren på tanken og kapasiteten til pumpa og rørsystemet, med andre hvor hurtig det er mulig å fylle tanken.
Etter at Regulatoren LIC har regnet ut riktig pådragssignal, så sendes dette til reguleringsventilen. Reguleringsventilen slipper så gjennom den riktige mengden veske.
Eksempel:
Tanken har 50 % nivå. Skal verdien er også stillt inn på 50 % og reguleringsavviket er 0 mm vannsøyle.
Så gir vi den håndstyrte ventilen en ekstra økt åpning slik at nivået i den øvre tanken begynner å minke. Dette senser DP cella eller LT level-transmitter og sender beskjed til regulatoren om at nivået synker. Regulatoren regner på basis av dette ut et nytt pådragssignal og sender dette til reguleringsventilen. Reguleringsventilen åpner opp og nivået stiger opp til det som tilsvarer skal-verdien igjen. I dette tilfellet så vil dette si 50 %.
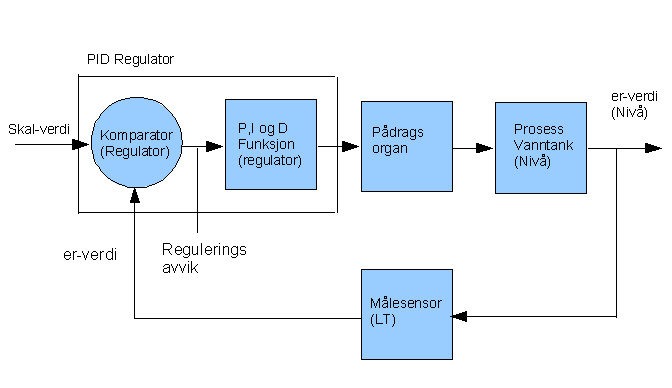
Sløyfemodell:
Virkemåten til regueringssløyfa kan også beskrives med en teoretisk sløyfemodell:
(Klikk på figuren for å se den tydelig.)
Blokkskjema, enkel nivåregulering: