
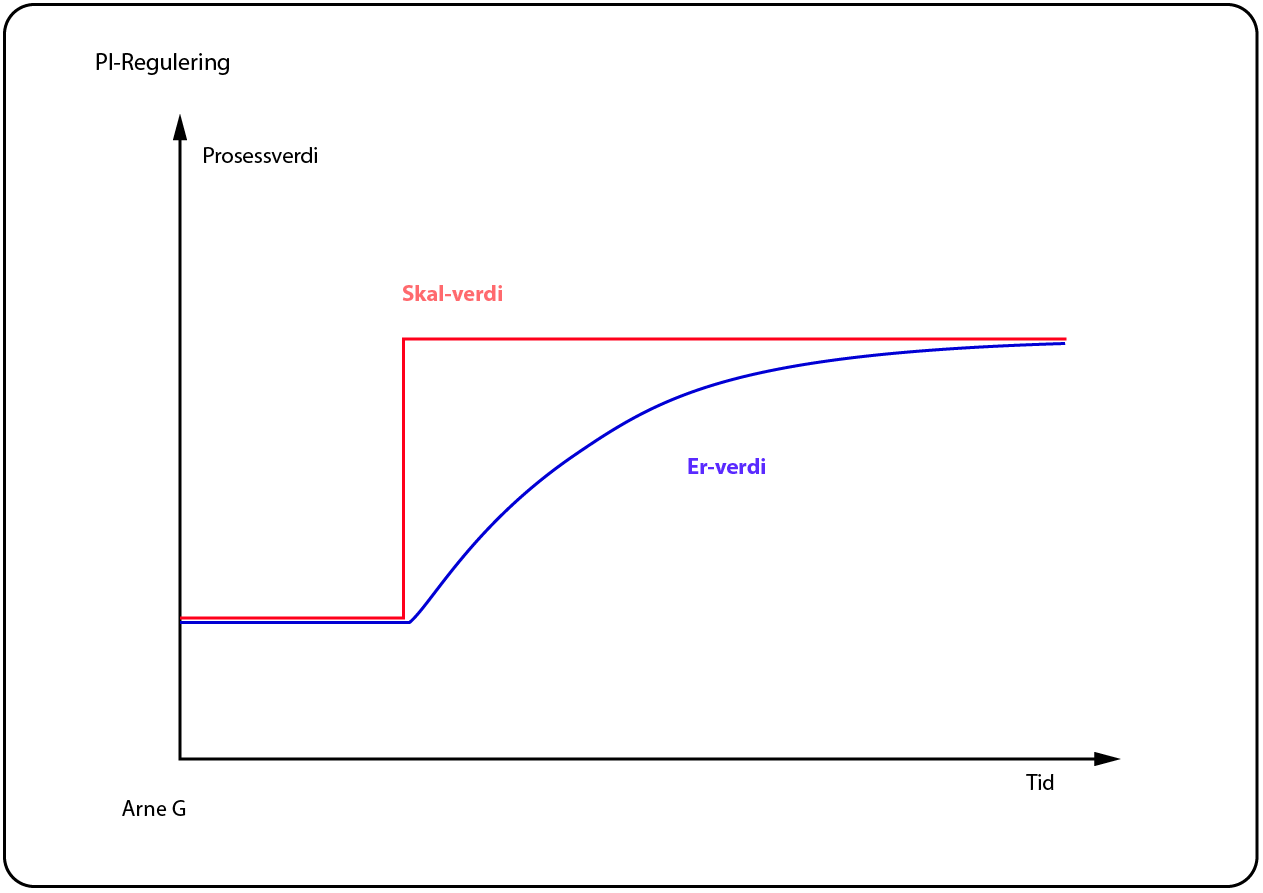
Ved å kombinere en P-funksjon og en I-funksjon, så kan man oppnå det som i utgangspunktet er en P-regulering, samtidig som man også har et I-ledd, eller en I-funksjon som fjerner det statiske avviket over tid. I-funksjon betyr i denne forbindelse «integralfunksjon». Denne funksjonen «integrerer opp» og kompenserer for avviket over tid, slik at vi kan oppnå et stasjonært avvik som er tilnærmet lik null.