

Her har vi gjennomført et «sprang» i endringen i skal-verdi, for eksempel fra 20% til 60% av full prosessverdi. Responsen fra prosessen er bare langsom og den når aldri helt opp til ønsket skal verdi. Vi får i stedet et «stasjonært avvik». Denne typen får vi typisk ved en ren P-regulering uten I-Funksjon og med en lav «instilling» for forsterkning eller «P-verdi». Man kan si at reguleringssløyfen er «treg» og «overstabil» og den har et «stasjonært avvik».
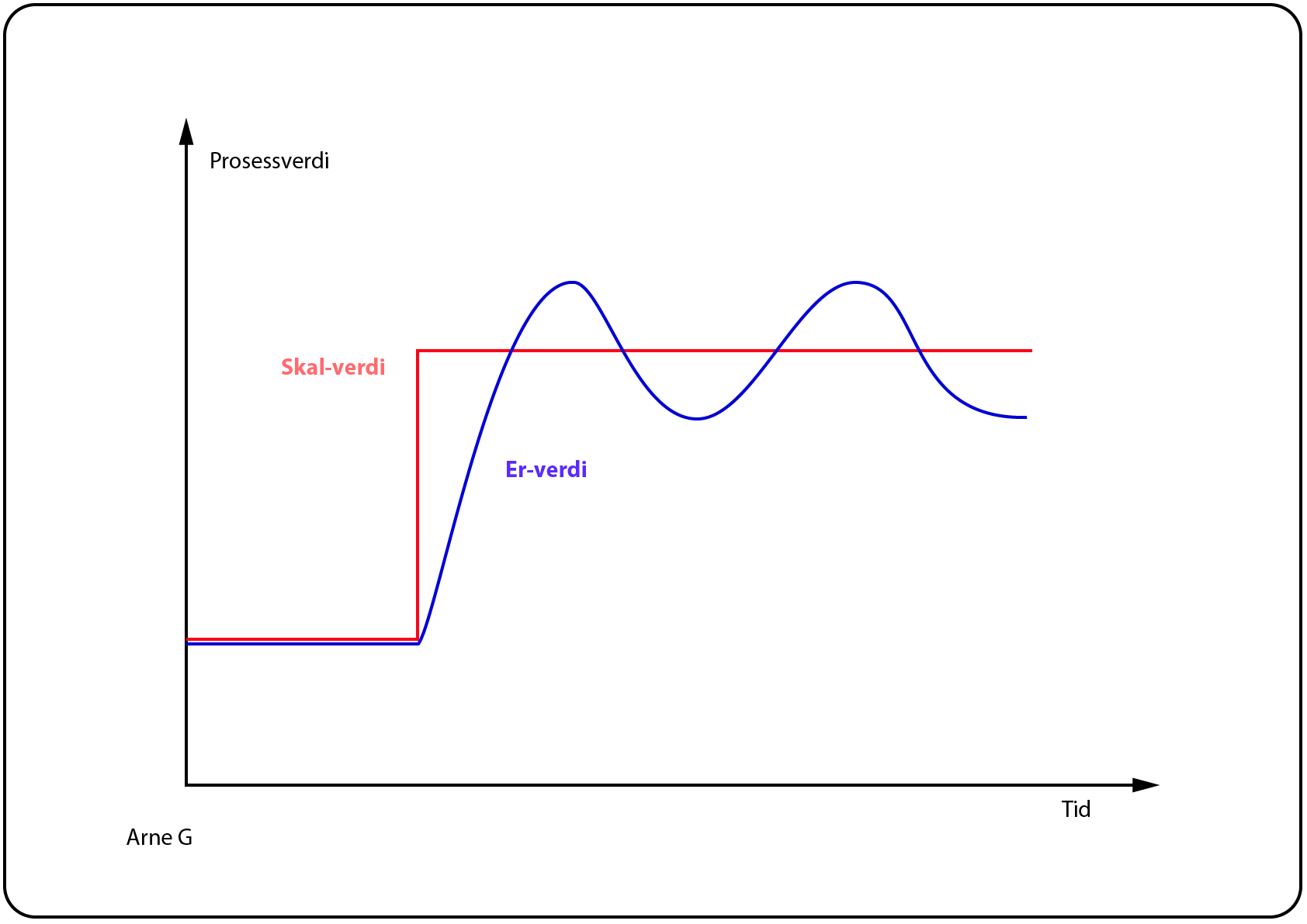
I figuren over så er reguleringssløyfa ustabil. Etter et sprang i skal-verdien så blir den stående og svinge eller osilere og den finner ikke fram til en ny «stabil driftstilstand».

Denne reguleringssløyfen har en gunstig «optimalisering» (Innstilling av P, I og D parametre). Når det skjer et sprang i prosessverdien så får man først et «oversving», så et «dempet undersving» så et lite oversving, og så treffer er-verdien tilnærmet helt rett i forhold til ønsket skal-verdi.
Oppgave 1